Tactile Display using “Suction Pressure
Stimulation”
Principle
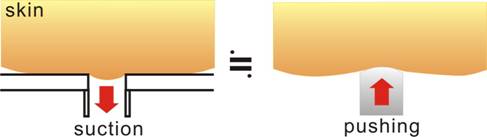
This research is based on our
discovery that “human can not discriminate Suction from Compression.” As shown in the figure, we feel pushed
sensation by suction pressure.
This tactile
illusion indicates that tactile mechanoreceptors detect not stress or strain
tensor directly, but Strain energy.
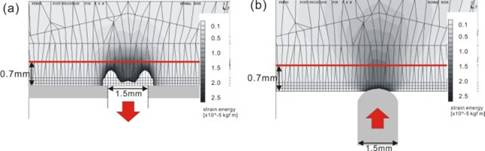
To confirm this hypothesis, we analyzed the strain energy distributions under
the skin surface using Finite Element Method. The distributions seem different
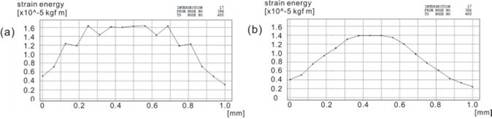
between two cases, as shown in the upper figure. However, when we focus on the
mechanoreceptor level (drawn with red lines), the distributions are similar
each other (lower figure). We suppose this is the reason why the human can not
discriminate suction from compression.
Advantages
One of the advantages of the
Suction Pressure Stimulation is that we can give stable stimulation to the
skin.
Because …
1) Little interference between each stimulator occurs, since the skin
deformation only occurs within a suction hole.
2) Skin surface is strongly constrained on the display surface by suction
pressure even when the intense stimulus was given.
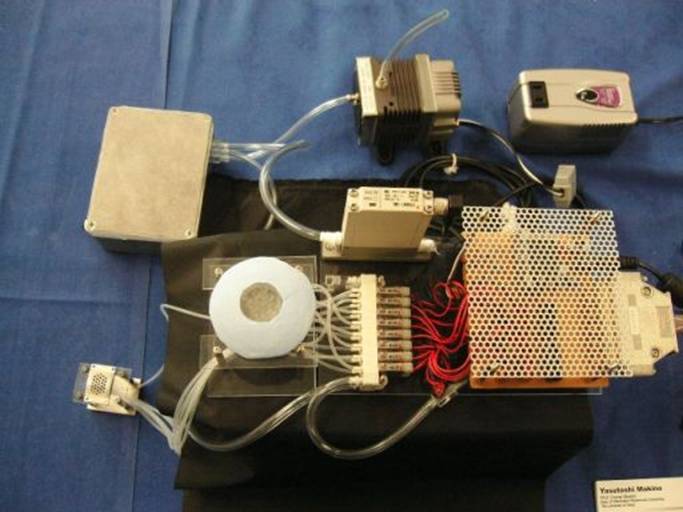
Main actuators (air valves and
regulators) can be set away from the display part by connecting them with thin
air tubes. That is, suction pressure tactile display only requires small holes
at the contact point. The display is easy to fabricate lightly and mountable
anywhere.
Settings (at
World HAPTICS 2005)

Yasutoshi
Makino: makino(at)sdm.keio.ac.jp